Então é assim, LuisR.A.:
O acelerómetro, teoricamente, permite-te estimar uma posição. Para isto consideras o teu ponto de partida 0 (zero) e tens de garantir medições regulares, sempre no mesmo intervalo de tempo. Ora, sabendo que a derivada em t da função que define a posição no tempo é a função da velociadade:
v(t) = dx/dt
e que a derivada da velocidade nas mesmas condições nos dá a aceleração:
a(t) = dv/dt
Então se primitivarmos (contrário de derivar) a aceleração lida no acelerómetro obtemos uma velocidade, se voltarmos a primitivar esta velocidade obtemos uma posição.
Acontece que é muito difícil obter bons resultados com este método por muitas razões sendo que o principal são os erros na leitura provocados por ruído.
O ruído é precisamente o motivo pelo qual não consegues boas leituras quando a velocidade é muito baixa ou constante. Nesta situação a aceleração costuma ser também muito baixa, variando à volta de 0 e aqui os valores reais dificilmente não serão interpretados como ruído.
Assim, para que é bom o acelerómetro? Lá por não ser bom para chegar a valores reais de posição este processo costuma produzir valores próximos da realidade, o que é bom para fazer correções ou usar como critérios de desempate em alguns processos. Mesmo o valor cru da aceleração pode ser bastante útil, por exemplo: No microrato os encoders opticos das rodas não me conseguem dizer em que sentido as rodas rodam mas esta informação pode ser obtida lendo a aceleração nesse momento, se for positiva vou num sentido, se for negativa vou no outro!
Há muitas aplicações para um acelerómetro!
Como prometido deixo-vos uma imagem com os 3 ratos que estou a fazer neste momento. Da esquerda para a dereita apresento-vos o, PICO, o uMouse Rev2.0 e por fim o Vertigo!

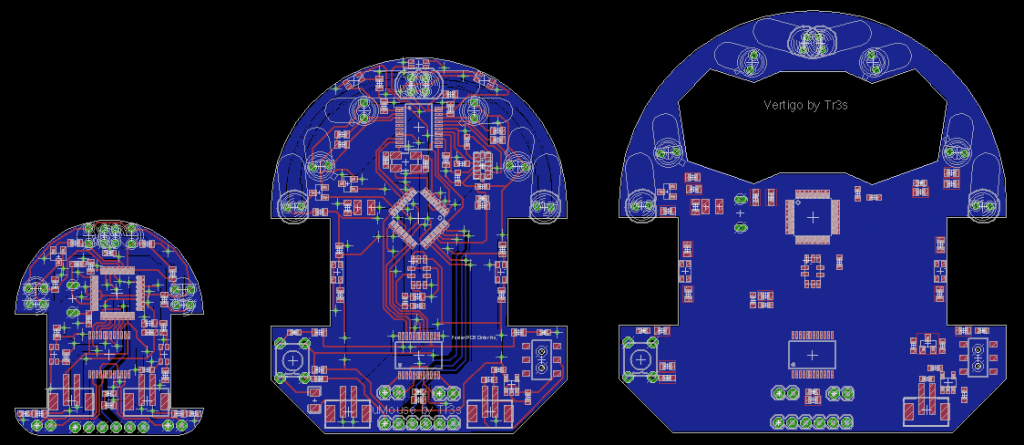
O PICO é um microrato com 3,5cm de largura e 4cm de comprimento tem exactamente metade da largura e altura do Vertigo. Tem menos funcionalidades que o uMouse, não tem multiplexer, gyroscopio nem acelerometro. Enquadra-se na categoria de 1/4 (quarter size) micromouse.
O uMouse Rev2.0 é um update ao uMouse original e vai ser a minha plataforma de testes. Foi basicamente todo redesenhado e tem algumas novidades: 2 Opto-encoders para as rodas, 3 sensores para entrar nas competiçoes segue-linhas, o eixo das rodas passou para uma posição mais central, perdeu o LDR mas tem 2 pinos disponíveis para outras brincadeiras. Este microrato é mais uma plataforma para "brincar", faz de microrato, segue-linhas, robot swarm, sumo bot, etc e enquadra-se tanto na categoria Half-size como Full-Size.
O Vertigo é um Full-size micromouse e estou a prepará-lo para funcionar exclusivamente em competições de microrato, sem mais nenhuma funcionalidade. Estudo a possibilidade de lhe colocar uns FaulHaber e mudar de MCU. Neste, como é maior, os circuitos de alimentação, tanto analógica como digital estão mais reforçados, há mais decoupling para reduzir erros nos ADCs etc..
Espero que gostem



