Viva a todos!
Há uns tempos atrás... (meses.. ) em conversa com amigo e amigos veio a vontade de participar no FestivalRobotica na Condução Autonoma com um robot...
Ora.. tendo eu bastante experiencia em projectos (falhados e outros não) pensei sériamente no que não devia ou devia fazer, pois o mais certo era nunca conseguir participar ou fazer mesmo um robot funcional, dada as caracteristicas e dificuldade da prova. .. Não por isto, mas talvez mais por causa do tempo (== preguiça e falta de tempo)
Isto quando já nao se estuda é complicado dizer que nos vamos dedicar a alguma coisa.. porque.. acabamos por nao conseguir :S
Ora neste sentido.. e desmoralizado com a dificuldade de criar uma equipa solida e organizada que desse em algo, decidi criar este simulador... que em caso de realmente alguma vez dar em alguma coisa, seria uma optima ferramenta de auxilio.
Para quem não se lembra bem o que é o Festival Nacional de Robotica e a CA:
http://www.spr.ua.pt/fnr/ http://pt.wikipedia.org/wiki/Condução_Autónoma
http://www.est.ipcb.pt/robotica2009/galeria/CA/ 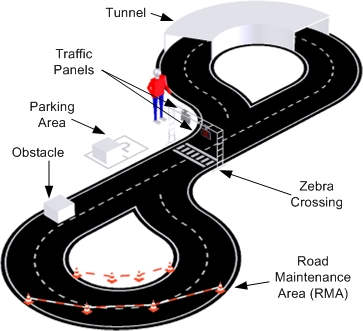
Como sofro do problema de tempo/vontade decidi colocar online como projecto no sourceforge.net
http://sourceforge.net/projects/truecas/ http://truecas.sourceforge.net/ Onde mais pessoal interessado poderá contribuir e evoluir o que já está feito... (ainda ha muito == tudo por fazer)
Algumas imagens para adoçar as vistas:


o trueCAS pretende não ser só um simulador/visualizador mas tambem uma plataforma de desenvolvimento, que permida desenvolver e testar os algoritmos de controlo/visão e ao mesmo tempo permitir usar tambem no robot real.
... quem sabe.. criar uma plataforma/robot GNU ou DIY baseado neste framework...
Em termos de funcionamento o que pretendia que fosse era o seguinte:

Haveria dois modos de funcionamento: o real e o simulado. no real a imagem vem directamente das webcams e os dados sensoriais do hardware (USB/serie..etc) .. no simulado os dados vem do resultado do rendering da simulaçao.
A parte do processamento e controlo seria igual para os dois modos e seria a parte a desenvolver para controlar o robot.
Ainda está muito verde o projecto, quem axar com skills e queira participar é só avisar!

Os sources já estao online, mas nao prometo que estejam compilaveis.. até porque ainda estou a ver que bibliotecas sao necessarias instalar e criar um help para isso.
[[]]
Mario 'KammutierSpule' Luzeiro


