ObjectivosAdaptar o meu Explorer Robot para a participação no desafio "Ajudar o Pai Natal". Como nunca tinha construído um seguidor de linha esta seria a altura certa para a primeira experiência e assim adicionar mais um modo de funcionamento ao meu bot.
DesenvolvimentoExplorer RobotComo eu tinha construído recentemente um robot, achei que seria prático dar-lhe alguma utilidade e adicionar-lhe mais uma funcionalidade.
Assim sendo o meu ponto de partida foi um bot já funcional, o Explorer Robot.
http://lusorobotica.com/index.php/topic,998.0.htmlSensor LinhaPara efectuar o percurso optei por construir um sensor segue linhas que funcione no meu robot como um acessório adicional e não de forma permanente.
O circuito do sensor é constituído pelo esquema seguinte, um para cada foto transístor usado (Só tinha dois, o que veio a tornar-se insuficiente).
Nota: Não sei se tem muito interesse, mas eu utilizei a pista inicial com a linha mais fina.

Notem que, eu substitui o LM358 do esquema por um comparador LM311 e assim tive de inserir resistências de pull-up nas saídas, isto porque estas são em open-drain.
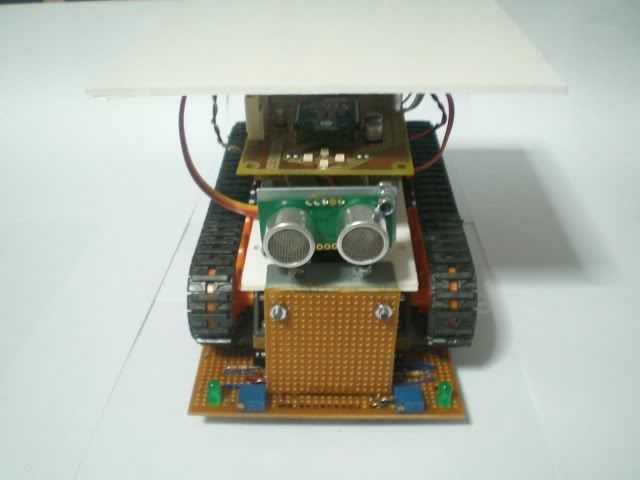
O produto final foi este.

 Pai Natal Mecânico
Pai Natal MecânicoDepois do sensor acabado só faltava adaptar o robot para poder transportar a dita prenda. Para isso adicionei um novo andar com uma placa PVC suficiente larga para poder poisar a prenda.
As decorações de Pai Natal foram feitas com ajuda da minha namorada para tornar o robot mais alusivo ao tema do desafio.

 Programação
ProgramaçãoEsta foi a parte mais demorada, isto porque, com o sensor que tinha construído tinha muitas limitações para a detecção da linha de forma eficiente. Assim, para conseguir ter uma resposta rápida aquando a passagem na linha decidi usar as interrupções de mudança de estado dos pinos do PIC. Já que ao testar os ditos ao longo do ciclo infinito não tinha a resposta adequada e o robot perdia o norte...
Como os sensores foram colocados muito próximos da linha, só dou ordem ao bot de se desviar quando o sensor que está a calcar a linha a atravessar completamente.
Mas os problemas não se ficaram por aqui, devido as limitações do sensor não consegui arranjar uma forma de o robot detectar o final do percurso. Por isso, tive de inserir um timer para contar o tempo ao longo do percurso e assim saber de forma impirica quando este tem de parar.
O código segue em anexo, porque está dividido em vários ficheiros.
Material Utilizado- Explorer Robot - Altura: 12cm, Comprimento: 19cm, Largura 15cm
- Sensor seguidor de linha - com 2 foto transistores CNY70 e 2 comparadores LM311
- Base em PVC para apoio da respectiva prenda
- Máscara de Pai Natal
- Prenda de Natal - Altura: 10cm, Comprimento: 10cm, Largura: 14cm
FinalFicam mais umas fotos do menino.


Vídeo


