Boas Pessoal...
Mais uma vez cá estou eu para mais um pequeno tutorial...
Bom depois de toda a tarde a ver se conseguia fazer um "hack" qualquer no meu motor shield para controlar servos, o certo é que nao consegui... E Desisti, porque a partir de certa altura achei que tava a desperdiçar tempo...
Entao decidi estudar um pouco a biblioteca que nos permite controlar tao facilmente os servos (Servo.h), e decidi entao fazer dois tutoriais pelo preço de um...

Espero que gostem....
Material Necessario (Hardware):- Servo
- Arduino
- Potenciometro
- 6x Fios De ligação
- Rectangulo de Pele (ou outro material nao condutor) para proteger o arduino
- Cabo USB
- Computador
- BreadBoard
Material Necessario (Software):- Arduino 0017 (Disponivel em arduino.cc)
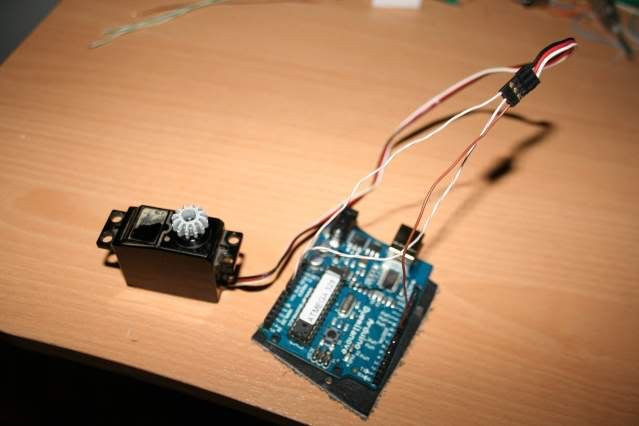
1º PassoPrimeiro que tudo temos de recolher todo o material necessario e ter uma secretaria minimamente limpa para puder trabalhar á vontade..
2º Passo - Ligar o fio branco da ficha do servo no pino 8 do nosso arduino.
- Ligar o fio vermelho da ficha do servo no pino 5v do nosso arduino.
- Ligar o fio preto da ficha do servo no pino GND do nosso arduino.


 3º Passo
3º PassoAbrir o programa Arduino 0017.
Visitar
este link para se ficar a conhecer melhor a biblioteca Servo.h.
Depois de esturdar-mos um pouco a biblioteca referida em cima, vamos entao proceder á programação.
4º PassoDepois de vermos do que a bliblioteca é capaz passemos á programação. Em baixo fica o codigo que alterei para melhor compreensão.
Está tudo comentado para que todos os que se iniciem em programação nao tenham grande dificuldade em perceber qualquer parte do codigo aqui estudado.
#include <Servo.h> // Biblioteca que permite controlar mais facilmete os Servos
Servo servo1; // Criação de um objecto que permitira controlar o servo
int posicao = 0; // inicialização da variavel posiçao a 0
int contagem = 0; // inicialização da variavel posiçao a 0
void setup()
{
servo1.attach(8); // Porta onde ira ser ligado o servo
}
void loop()
{
if (contagem < 20){ // Condiçao, se a variavel contagem for menor que 20 faz o codigo que esta ente {}
for(posicao = 0; posicao < 180; posicao +=1) // Servo gira da posiçao 0 para a posiçao 180 de 1 em 1 grau
{
servo1.write(posicao); // "Escreve" no pino 8 a posiçao para onde o servo se vai deslocar
delay(3); // Espera de 3 milisegundos para que o servo possa chegar á sua posiçao
}
for(posicao = 180; posicao>=1; posicao-=1) // Servo gira da posiçao 180 para a posiçao 0 de 1 em 1 grau
{
servo1.write(posicao); // "Escreve" no pino 8 a posiçao para onde o servo se vai deslocar
delay(3); // Espera de 3 milisegundos para que o servo possa chegar á sua posiçao
}
contagem ++; // Adiciona mais 1 á variavel contagem
}
} Coloquei um pequeno contador para o servo nao estar infinitamente a girar para um lado e outro, assim depois de 20, que é mais que suficiente para vermos que está tudo ok, o servo para.
5º PassoVamos agora proceder ao Upload do codigo para o arduino.
-
Primeiro ligamos o USB ao ArduinoFOTO INDISPONIVEL
-
Depois ao PC
-
Depois é so carregar no botao de Upload
-
E por fim esperar que no canto inferior esquerdo apareça a mensagem "Done Uploading"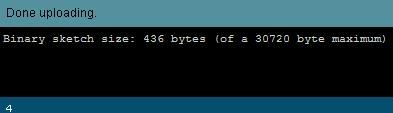 NOTA:
NOTA: Se neste passo acontecer algo e nao aparecer essa mensagem, recomendo a verificarem o codigo e/ou se o cabo está correctamente ligado ao PC e ao Arduino.
6º PassoTestar o servo com o potenciometro e sem o potenciometro.
(Video Brevemente Disponivel) -> Tou sem Camera...
Montagem com potenciometroPara controlarmos um servo com um potenciometro teremos que seguir estes passos...
A - Ligar o terminal do meio do potenciometro a um dos pinos analogicos do arduino (eu utilizei o 0).

B - Ligar o terminal de um dos lados do potenciometro aos 5v do nosso arduino
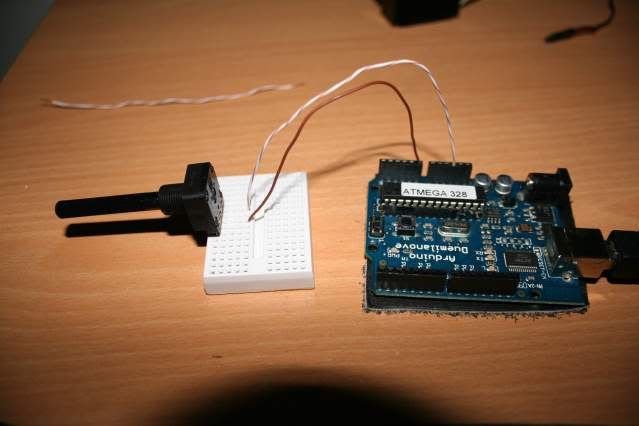
C - Ligar o ultimo terminal ao GND do arduino
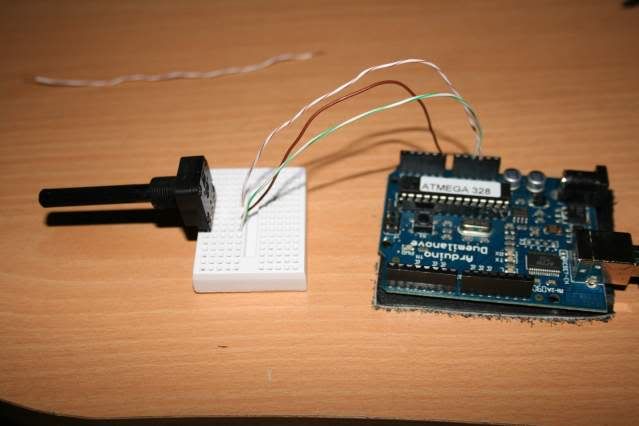
D - Ligar o fio preto ao GND do arduino.
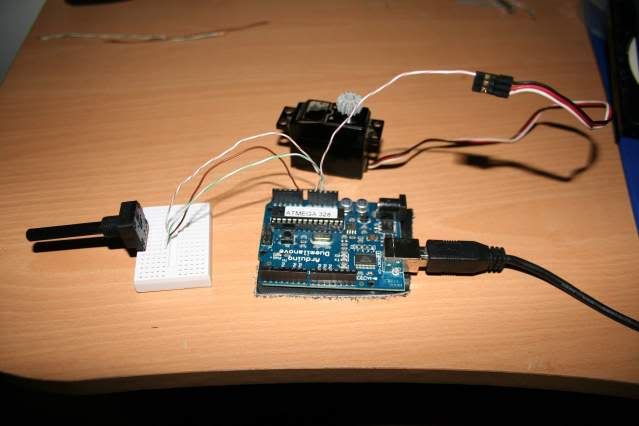
E - Ligar o fio vermelho ao terminal do potenciometro onde se encontram os 5v (provenientes do arduino)
F - Ligar o fio branco do servo a um pino do arduino (Eu utilizi o 8 )

G - Utilizando a mesma biblioteca (Servo.h) vamos entao programar o nosso Atmega para que se possa controlar o servo pelo potenciometro...
Comentei todo o codigo para que todos facilmente o entendam...
#include <Servo.h> // Biblioteca que permite controlar mais facilmete os Servos
Servo servo1; // Criação de um objecto que permitira controlar o servo
int pinopot = 0; // Declaração da variavel para o pino que vai ler o valor do potenciometro, neste caso é o pino analogico 0
int valor; // Declaração da variavel onde vai ser colocado o valor lido do pino analogico 0
void setup()
{
servo1.attach(8); // Porta onde ira ser ligado o servo
}
void loop()
{
valor = analogRead(pinopot); // leitura do valor do potenciometro e "escrita" desse valor na variavel valor
valor = map(valor, 0, 1023, 0, 179); // Escala para que o valor do potenciometro possa corresponder a um valor de posiçao no servo
servo1.write(valor); // Gira o servo de acordo com a escala da linha acima
delay(1); // Espera de 1 milisegunda para que o servo possa atingir a sua posiçao
} Depois do passo "G" é so continuar com o 5º e 6º passo mencionados em cima...
Espero que tenham Gostado e peço desculpa por algum erro...
Cumps
AndréD.


