


Para verem mais fotos:
http://picasaweb.google.pt/ricdays/CleanBOaTApresentação do ObjectivoApresento-vos outro projecto em desenvolvimento: o CleanBOaT.
Cansado de limpar a superfície da (espécie de) piscina, resolvi fazer um pequeno robot para apanhar os bichos que vão caíndo.
Componentes do CleanBOaTPara o BOaT se manter à superfície, utilizei
uma caixa de Ferrero Rocher (passo a publicidade), que suportará todos os componentes electrónicos, com
duas garrafas de água coladas de lado, que ajudarão a boiar.
Para a locomoção, resolvi utilizar
um motor DC, com uma pá para ventoinha (tinha aqui umas quantas de um brinquedo velho), com um leme direccionado por um
servo. Este leme dará a direção do CleanBOaT.
Para decidir esta direcção, vou utilizar
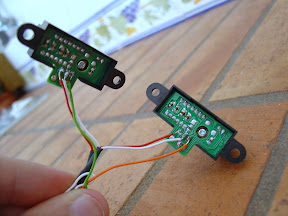
dois sensores de distância Infravermelhos da Sharp. Estes sensores serão localizados na lateral e servirão para medir a distância do robô às paredes da piscina.
Para conjugar todos estes componentes vou, claro, utilizar um Arduino (ATMega168)
Exemplo de Funcionamento - DecisõesSituação-exemplo 1: o sensor da esquerda não detecta nada, o sensor da direita detecta a parede situada a 30cm. Servo roda para fazer com que o robô se afaste da parede.
Situação-exemplo 2: os dois sensores detectam a parede à mesma distância dos dois. Isto significa que o barco está virado de frente para a parede. O motor DC será invertido e o leme virado para que o barco rode, pelo menos 90º, para que possa depois continuar o seu trabalho.
Estado do Projecto- llllllllll 100% - Construção da Base (Caixa + Garrafas)
- llllllllll 100% - Construção do Leme
- llllllllll 100% - Fixação do Leme ao Servo
- llllllllll 100% - Fixação do Servo À Base
- llllllllll 100% - Colocação dos Sensores IR
- llllllllll 100% - Programação do Arduino
- 10/Ago/09 - Protótipo concluído
A próxima fase é fazer uma placa que inclua a ATMega168 do Arduino, a ligação para os sensores, bateria, motor, etc...
Basicamente, quero substituir o Arduino e a Protoshield por uma única placa.

Custos25€ - Arduino
10€ - Servo
0€ - Motor
0€ - Caixa e Garrafas
7€ - Outros componentes electrónicos
16€ - Sensores IR
2€ - Régua de Alumínio (Suporte dos Sensores) + parafusos, porcas, anilhas, etc...
Total: 60€
Já sabem: opiniões, sugestões, são bem-vindas...


