Boas Pessoal...
Estive a testar o meu
MotorShield e como tal decidi fazer um pequeno tutorial a explicar como podem controlar dois motores DC através do vosso arduino mais o motorshield.
A minha ideia será a seguinte, como sabem o motorshield permite controlar motores DC e motores de passo, como não tive tempo nem tenho o material necessário para testar estes três tipos de actuadores vou apenas colocar o controlo de motores DC, assim que tiver o material para os outros dois tipos de actuadores farei um tutorial e colocarei aqui neste mesmo tópico, para ficar-mos com um sitio que tenho tudo sobre o
MotorShield V3.0.
Espero que gostem.
Como montar Motor Shield V3.0 - ArduinoMaterial Necessário (Hardware):- Base Com Dois Motores DC
-
Arduino-
MotorShield V3.0- 4X Crocodilos
- Parafuso
- Chave Philips (Estrela)
- Rectângulo de Pele (ou outro material nao condutor) para proteger o arduino
- Cabo USB
- Computador
Material Necessário (Software):- Arduino 0017 (Disponível em arduino.cc)
1º PassoArranjar uma base que tenha 2 motores DC (por sorte eu ja tinha uma ca em casa, do meu primeiro robot segue linhas)
 2º Passo
2º PassoLimpar a base e retirar toda a electrónica que nela estiver (se tiver).

 3º Passo
3º PassoColocar o material nao condutor na base, colocar o arduino em cima e agarrar tudo isto com o parafuso á base.
 4º Passo
4º PassoDepois colocar o MotorShield em cima do arduino, neste processo temos de ter atenção onde ficam os pinos encaixados, sendo que o Vin do MotorShield terá que ficar em contacto com o Vin do Arduino e o pino 0 do MotorShield com o Pino 3 do Arduino.
 5º Passo
5º PassoVamos agora iniciar a programação...
Temos de ter o esquema da placa presente para que possamos entender o seu funcionamento. o esquema esta disponivel
aquiEntao abrimos o documento com o esquema (Motor_control_v3.0_sch.pdf) e o Arduino 0017 para começarmos a programar.
Verificamos o seguinte:Se DIRA = 0 o motor 1 anda para a frente
Se DIRA = 1 o motor 1 anda para tras
Se DIRB = 0 o motor 2 anda para a frente
Se DIRB = 1 o motor 2 anda para tras
Se DIRA = 0 e DIRB = 0 o motor 1 e o 2 andam em simultaneo para a frente
Se DIRA = 1 e DIRB = 1 o motor 1 e o 2 andam em simultaneo para tras
Se DIRA = 0 vai virar para a esquerda
Se DIRB = 0 vai virar para a direita
Se DIRA = 0 e DIRB = 1 vai rodar para a esquerda rapido (motor 1 anda para a frente e o motor dois anda para tras)
Se DIRA = 1 e DIRB = 0 vai rodar para a direita rapido (motor 1 anda para tras e o motor dois anda para a frente)Depois desta fase podemos entao começar a programar.
O codigo que desenvolvi foi o seguinte:
/*Codigo Desenvolvido Para Controlo de 2 Motores DC com o MotorSHieldV3.0
By: AndréD.*/
int PWMA=10; //pino pwm do motor 1
int PWMB=11; //pino pwm do motor 2
int DIRA=12; //pino de controlo do motor 1
int DIRB=13; //pino de controlo do motor 1
void setup()
{
analogWrite(PWMA,255); //definir PWM do motor 1 para velocidade máxima (0 a 255)
analogWrite(PWMB,255); //definir PWM do motor 2 para velocidade máxima (0 a 255)
}
void loop()
{
frente(); //chama a função frente
delay(5000); //os motores andam para a frente durante 5 segundos
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
tras(); //chama a funçao tras
delay(5000); //os motores andam para a tras durante 5 segundos
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
sp_esquerda(); //chama a funçao sp_esquerda
delay(5000); //o motor 1 anda para a frente e o motor 2 anda para tras permitindo assim uma viragem rapida para a esquerda
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
sp_direita(); //chama a funçao sp_direita
delay(5000); //o motor 1 anda para a tras e o motor 2 anda para frente permitindo assim uma viragem rapida para a direita
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
esquerda(); //chama a funçao esquerda
delay(5000); //o motor 1 roda para a frente permitindo assim uma viragem a esquerda
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
direita(); //chama a funçao direita
delay(5000); //o motor 2 roda para a frente permitindo assim uma viragem a direita
stop_(); // chama a funçao stop
delay(1000); // permanece imovel durante 1 segundo
}
void frente()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,LOW);
}
void tras()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,HIGH);
}
void sp_esquerda()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,HIGH);
}
void sp_direita()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,LOW);
}
void esquerda()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRA,LOW);
}
void direita()
{
//ver nota no inicio do programa
analogWrite(PWMA, 255);
analogWrite(PWMB, 255);
digitalWrite(DIRB,LOW);
}
void stop_() { // Esta funçao define o PWM a 0 para que a plataforma possa parrar.
analogWrite(PWMA, 0);
analogWrite(PWMB, 0);
}Já testei e está a funcionar, se houver algum problema ou algo que acham que devo alterar é so sugerirem.
6º PassoDepois de termos o MotorShield em cima do Arduino e a programação feita e pronta a ser testada vamos fazer as ligações aos motores com os crocodilos, da forma representada em baixo:
Neste passo e muito importante que as ligações nao fiquem em contacto umas com as outras, para isso dobrem um pouco os pinos nas saidas dos motores para que os crocodilos "estejam á vontade".



 7º Passo
7º PassoVamos agora proceder ao Upload do codigo para o arduino.
-
Primeiro ligamos o USB ao Arduino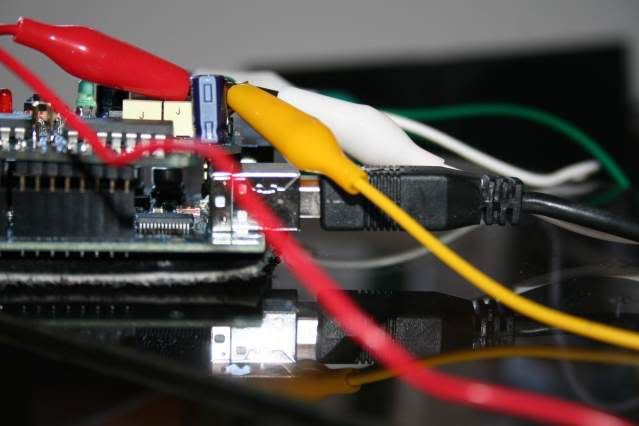
-
Depois ao PC
-
Depois é so carregar no botao de Upload
-
E por fim esperar que no canto inferior esquerdo apareça a mensagem "Done Uploading" NOTA:
NOTA: Se neste passo acontecer algo e nao aparecer essa mensagem, recomendo a verificarem o codigo e/ou se o cabo está correctamente ligado ao PC e ao Arduino.
8º PassoTestar a base a andar...
(Video Brevemente Disponivel) -> Tou sem Camera...
Espero que tenham Gostado e peço desculpa por algum erro que possa surgir...
Cumps
AndréD.


