 Links de Robótica
Links de Robótica
Posts Recentes
Humanoide robô por josecarlos
[05 de Julho de 2026, 19:27]
Heathkit por SerraCabo
[25 de Abril de 2026, 12:48]
Desenvolvimento de projetos com agentes AI por jm_araujo
[29 de Março de 2026, 21:59]
Ajuda com Antena TDT por almamater
[13 de Março de 2026, 09:29]
Not Just Printers. It Bans Everything. por SerraCabo
[11 de Fevereiro de 2026, 14:48]
Como lutar contra a "enshitification" por jm_araujo
[30 de Janeiro de 2026, 17:10]
Ajuda Pcb USB 3.0 por andlig
[23 de Novembro de 2025, 19:59]
Motor ventoinha por KammutierSpule
[10 de Novembro de 2025, 20:43]
Aquisição da Arduino LLC pela Qualcomm por SerraCabo
[22 de Outubro de 2025, 14:16]
MMD-1 Mini Micro Designer Restoration - Part 1 por SerraCabo
[22 de Outubro de 2025, 12:44]
|
LusoRobótica - Robótica em Portugal
A robótica é uma das ciências mais desafiantes. A perfeita fusão harmoniosa entre um sem fim número de ciências faz da robótica um excelente desafio, que nos convida a imergir neste grandioso mundo da tecnologia, e utilizar a construção de robots como uma forma única de explorar todas as ideias que nos surgem no dia-a-dia.
Junta-te a nós e aprende como a robótica pode mudar a maneira como observas o mundo. Ajuda-nos a desmistificar a robótica em Portugal!
28 de Julho de 2010, 16:00 por vicardosof | Visualizações: 10308 | Comentários: 0
Essas leis são fundamentais para todos que desejam saber um pouco mais de electrónica. Elas determinam o sentido, intensidade de cada corrente! Também determinam a tensão em cada componente no circuito. Alguns conceitos principais: 1) NÓ: Quando um componente é ligado num fio. Exemplo: 2) MALHA: Conjunto "fechado" de nós, onde a corrente pode circular geralmente em quadrado: Primeira lei: A soma das correntes que entram num nó é igual a soma das correntes que partem dele. Segunda Lei: A soma das tensões dentro de uma malha é nula. Regras de aplicação: 1) Considerar que a corrente circula em sentido horário! 2) Cada componente, registrar a queda de tensão. 3) Em fontes de alimentação, verificar se é uma queda de tensão OBS: Caso o resultado da corrente seja negativo, considerar que ela circula em sentido anti-horário! DETERMINAÇÃO DAS EQUAÇÕES DE MALHAS: Considere: R1 = 5 ? R2 = 10 ? R3 = 15K ? E1 = 12 V Para formar a equação: 1) Determinar as quedas de tensão e igualar a 0 -5i - 10i - 15ki + 12 = 0 -15i - 15ki = -12 15i + 15000i = 12 15015 i = 12 i = 800uA Para calcular a tensão em cada resistor, multiplique a corrente por sua resistência. Caso seja num grupo de resistores, calcular a Req do conjunto. Peço que reportem qualquer erro e coloquem comentários.
28 de Julho de 2010, 00:34 por preytender | Visualizações: 57510 | Comentários: 41
Nos ultimos dias tenho andado a pesquisar e a reunir um conjunto de técnicas para trabalhar com plastico. A idéia é utilizar esses conhecimentos para construir peças personalizadas, suportes, chassis, enfeites etc.... Aqui estão algumas técnicas possiveis de utilizar sem grandes custos nem equipamentos. Cortar AcrilicoExistem várias maneiras de o fazer aqui vão algumas ideias: Serra Tico-Tico: Esta deve ser a opção ideal infelizmente não tenho esse equipamento (ver comentários para mais info). Serra Normal: Perfeito para cortes em linha recta. Dremel+Disco de Corte: Nunca consegui fazer um corte limpo, por isso so uso para abrir buracos grandes e depois tenho algum trabalho com uma lima para corrigir o corte. Dremel+Broca: Fazer um furo e arrastar lentamente, teoricamente nunca deveria ser feito mas para fazer buracos pequenos ou formas mais complexas é muito util. X-acto (até 3mm de espessura): Fazer uma marca profunda com um x-acto e régua (de preferência matálica) de ambos os lados (passar 2 ou 3 vezes o x-acto). Depois encostando o corte à beira de uma mesa e pressionando a régua contra a mesa em cima do acrilico e à beira do corte, "parte-se" o acrilico. Ele parte pelo corte. Polir as arestas dos cortesO video aqui explica tudo, a ideia é retirar todas aquelas marcas de corte das arestas, ja testei isto e posso dizer que funciona muito bem. Dobrar Acrilico - Pistola de ar quentePara dobras simples como um angulo de 90º, 45º etc... método da pistola de ar quente, ja testei e funciona a unica recomendação é não tentar fazer com o secador de cabelo, o secador morreu depois do teste. Dobrar Acrilico - FornoPara formas mais complexas, método do forno, este ainda não consegui testar vou tentar fazer um clindro de acrilico com exactamente 14cm de diametro e 5cm de altura. Vou seguir o método deste site: http://www.nano-reef.com/forums/index.php?showtopic=88081&st=0&start=0As potencialidades deste metodo são grandes como se pode ver no video Colar AcrilicoO video em baixo é um anuncio a uma marca de cola, a verdade é que me convenceu, segundo o video as superficies coladas ficam com tanta resistencia como as originais. Tenho agora que tentar descobrir se isso se arranja em portugal ou pelo menos se existe algo com propriedades semelhante. Criação de Moldes e duplicaçãoIsto foi algo que encontrei no caminho e achei muito interessante "Alumilite" ver o link para site, tem montes de videos a explicar como fazer na secção de "how to's" http://www.alumilite.com/index.cfm O que me chamou a atenção é que há kits com todo o material necessário no ebay e não são demasiado caros http://cgi.ebay.co.uk/Alumilite-Mini-Casting-Kit-Make-Molds-Cast-Resin-Fast-/230474443075?cmd=ViewItem&pt=LH_DefaultDomain_0&hash=item35a958e943Decidi partilhar aqui porque pode interessar a alguem e agradeco qualquer sugestões ou ideias para fazer melhor. Abraço.
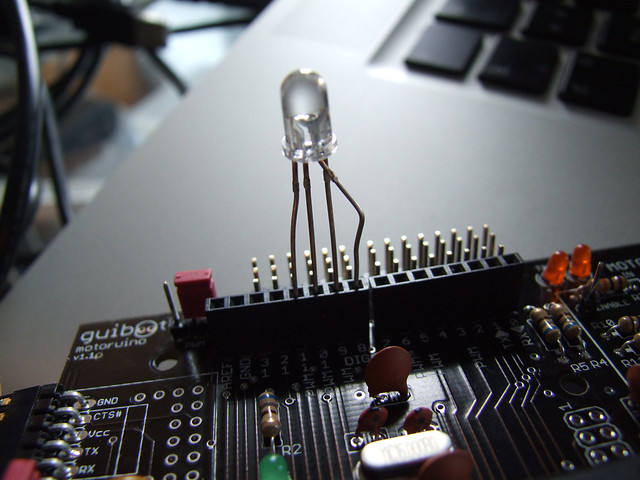
22 de Julho de 2010, 14:53 por guibot | Visualizações: 16438 | Comentários: 10
Já faz tempo que ando a procura de uma maneira simples de enviar informação do Processing para o Arduino e de todas as bibliotecas e técnicas que experimentei não encontrei nenhuma que me agradasse. Como não sou programador pedi ajuda ao meu amigo @pauloricca, e ele deu-me uma solução muito simples de implementar e fácil de entender, todos os créditos da parte da comunicação serial vão para ele. Para melhor exemplificar este exemplo usei um LED RGB, e liguei-o directamente aos pins do Arduino ( NUNCA FAÇAM ISTO a não ser que queiram matar os vossos leds rapidamente). A maneira correcta é usar uma resistência em série nos pins dos leds, mas sobre esta matéria existem imensos tutoriais disponíveis e eu quero-me focalizar apenas na parte do envio de dados para o arduino. Ainda no lado do Arduino foram definidos 3 pins de OUTPUT 9, 10, e 11, estes pins vão enviar PWM para cada um dos leds. O pin 8 é definido também como OUTPUT e vai servir como pin de GROUND. Dentro da função loop() usa-se a função switch() que detecta qual é o caracter 'R', 'G', ou 'B' que foi enviado do processing. Este caracter é meramente de sincronização e serve para nos dizer qual é o valor que vem a seguir, veremos isso melhor no lado do Processing. Depois a função GetFromSerial() é chamada sempre que quizermos ver que informação é que vem a caminho. void setup()
{
// declare the serial comm at 9600 baud rate
Serial.begin(9600);
// output pins
pinMode(9, OUTPUT); // red
pinMode(10, OUTPUT); // green
pinMode(11, OUTPUT); // blue
// another output pin to be used as GROUND
pinMode(8, OUTPUT); // ground
digitalWrite(8, LOW);
}
void loop()
{
// call the returned value from GetFromSerial() function
switch(GetFromSerial())
{
case 'R':
analogWrite(9, GetFromSerial());
break;
case 'G':
analogWrite(11, GetFromSerial());
break;
case 'B':
analogWrite(10, GetFromSerial());
break;
}
}
// read the serial port
int GetFromSerial()
{
while (Serial.available()<=0) {
}
return Serial.read();
}
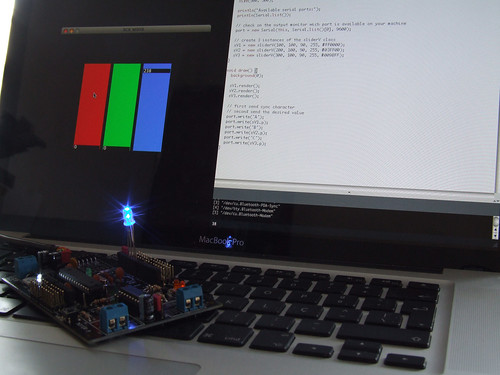
No lado do Processing, estou a usar uma classe para o slider adaptada de uma classe existente do anthonymatox.com. São criadas 3 instâncias desta classe (vou assumir que entendem o conceito de classe e seus derivados). Notem também que é importada a biblioteca Serial e a criação de uma instância chamada "port". Na funcção setup() estou a ver qual é a porta de comunicação disponível, no meu caso e porque estou a usar mac é a 0, para quem usa pc há-de ser COM1, ou COM2, com COM# onde # é sempre um número. Finalmente faço o envio de valores de cada slider através do comando port.write(valor). Notem que antes de enviar cada valor do slider envio sempre um caracter de sincronização 'R', 'G', ou 'B'. import processing.serial.*;
Serial port;
sliderV sV1, sV2, sV3;
color cor;
void setup() {
size(500, 500);
println("Available serial ports:");
println(Serial.list());
// check on the output monitor wich port is available on your machine
port = new Serial(this, Serial.list()[0], 9600);
// create 3 instances of the sliderV class
sV1 = new sliderV(100, 100, 90, 255, #FF0000);
sV2 = new sliderV(200, 100, 90, 255, #03FF00);
sV3 = new sliderV(300, 100, 90, 255, #009BFF);
}
void draw() {
background(0);
sV1.render();
sV2.render();
sV3.render();
// send sync character
// send the desired value
port.write('R');
port.write(sV1.p);
port.write('G');
port.write(sV2.p);
port.write('B');
port.write(sV3.p);
}
/*
Slider Class - [url=http://www.guilhermemartins.net]www.guilhermemartins.net[/url]
based on [url=http://www.anthonymattox.com]www.anthonymattox.com[/url] slider class
*/
class sliderV {
int x, y, w, h, p;
color cor;
boolean slide;
sliderV (int _x, int _y, int _w, int _h, color _cor) {
x = _x;
y = _y;
w = _w;
h = _h;
p = 90;
cor = _cor;
slide = true;
}
void render() {
fill(cor);
rect(x-1, y-4, w, h+10);
noStroke();
fill(0);
rect(x, h-p+y-5, w-2, 13);
fill(255);
text(p, x+2, h-p+y+6);
if (slide==true && mousePressed==true && mouseX<x+w && mouseX>x){
if ((mouseY<=y+h+150) && (mouseY>=y-150)) {
p = h-(mouseY-y);
if (p<0) {
p=0;
}
else if (p>h) {
p=h;
}
}
}
}
}
Páginas: 1 ... 49 50 [ 51] 52 53 ... 187 |
Quem está online
 Google Google- Baidu (39)
Estatística LusoRobótica
 Total de Membros: 4.072 Total de Membros: 4.072- Total de Mensagens: 106.883
- Total de Tópicos: 9.112
- Total de Categorias: 8
- Total de Quadros: 71
- Recorde utilizadores online: 15.082
|







 Visitantes: 668
Visitantes: 668 Spiders: 40
Spiders: 40 Escondidos: 0
Escondidos: 0 Membros: 0
Membros: 0