14/04/10
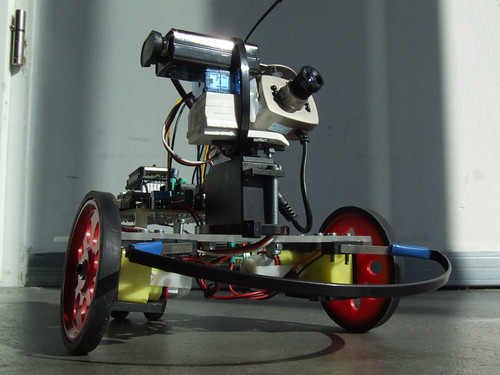
Boas, apresento a minha nova criação

Estive sem saber o que lhe chamar, pensei em chama-lo de ''rutgers'' um gajo que propos a ''teoria do circulo'' como o 'bot é formado por circulos empilhados...
Circle theory.
Originates from Rutgers Camden. States that men are fixated on certain things because of their roundness. This encompasses, breasts, all manner of sport balls, bald heads, streetlights. The circle theory states that men in history and entertainment who want to dominate the world have this desire because it is round.

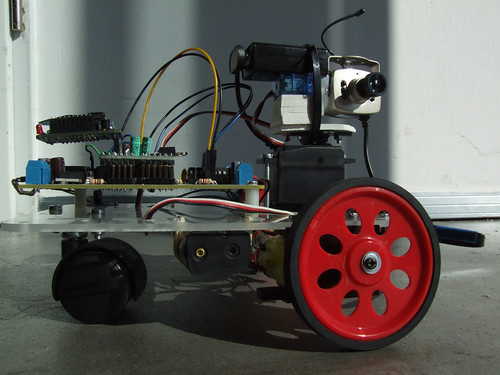
Bem, estou a usar rodas de impressora, que tinha por aqui, com uns discos de encoder colados(ainda não os testei)

e um ball caster á frente, mas como as gearboxes tem alguma força, ele levanta cavalo, e estraga o acrilico

por isso tirei isto de uma aparelhagem velhota:

tive problemas só com uma sn754410NE, aquecia imenso, os motores dizem que puxam 4 amps, a ponte só aguenta 2 durante 5 mili segundos

por isso puz outra em cima

continua a ser pouco, se forem á vida, logo meto 3


a female header vai dar aos 5v, gnd, e sinais, quero no futuro meter lá um attiny, a comunicar por i2c com o arduino(aproveito para aprender um bocado de i2c)
o chassis tm 15cm de diametro, e 4.5cm de altura, ainda vou adicionar outro ''andar'' de acrilico, na versão final.

ainda tenho de por os power supplies, e encoders aí dentro
também quero parar de usar pilhas de 9v, 4€ cada uma, e duram umas horitas, com sorte... já tenho tudo para fazer um dc boost com o max756, só me falta um inductor


Planos para esta semana:
- por o que está na breadboard, em PCB, esta com USB-ftdi logo instalado, para programar facilmente(agora que sei usar o eagle, é muito mais fácil)
- adicionar um buzzer para avisos, de momento só tenho quando os motores arrancam, mas quero por de bateria fraca, etc.
- adicionar este LCD para debugging para quando for seguir linhas:

é 1x16, mas perdi o conector
tenho outro pouco maior, 2x16, talvez me fique por esse.
logo vou postando updates.
cumps

14/04/10
Os planos...
- Começei por pesquisar na net outros robots, pois não sabia bem o que queria que o meu fizesse, acabei por encontrar maze solvers, e o 3pi da pololu serviu de inspiração, mas não queria ficar limitado a um circulo de 9cm de diametro
por isso aumentei o diametro, e adicionei ''andares''
- Depois, servos, ou motores DC? da ultima vez que usei servos, não gostei, lentos, e fracos(mas o outro 'bot pesava o dobro deste)
- Juntar o material, tinha uma caixa cheia de peças de impressoras, faxes, leitores de cassetes, etc fui tirar de lá as rodas, e a rodinha para não fazer cavalo.
- Medir o material, gearbox, as rodas, enfim, tudo, e fiz um modelo 3D no google sketch up. tirei as medidas do sketch up, e usei o inkscape para fazer o desenho em 2D(em anexo).
- queria começar a ter alguma coisa física para testar, de seguida imprimi esses desenhos, e colei a uma folha de cartão
depois da cola secar, cortei com uma tesoura, e furei com a dremel(cartão do rijo
)
agradeço-me a mim mesmo de ter feito isto, pois os buracos para os parafusos da gearbox, estavam mal colocados
depois de ter praticamente o gajo feito em cartão, corriji os desenhos no inkscape, e colei na placa de acrilico, cortei com a serra de vaivém(tinha lido na net que cortar acrilico sem ser com máquina especifica poderia sem complicado, pois ele derretia, e ficava uma porcaria, mas lá no LMR vi um post que falava de uma lamina especifica para acrilico, cortou aquilo como manteiga, e sem aquecer demasiado
)
depois para espaçar os dois circulos de acrilico, queria usar anilhas de nylon, tinha 3, mas precisava de 6, não encontrei em lado nenhum, e tive de usar tubo de pvc, e varão roscado M4
os battery packs estão pegados ao chassis com velcro, é perfeito para por e tirar.
A ideia do plástico transparente á volta, veio só no fim
tenho o line follower feito, com 3 QDR1113, estão-me a aconselhar 5, para quando for resolver labirintos, logo se vê...
em anexo está um pdf de um tutorial escelente para quem quiser fazer um maze solver
obg pelos comentários positivos








 Visitantes: 518
Visitantes: 518 Spiders: 18
Spiders: 18 Escondidos: 0
Escondidos: 0 Membros: 0
Membros: 0
 Google (2)
Google (2) Total de Membros:
Total de Membros: