


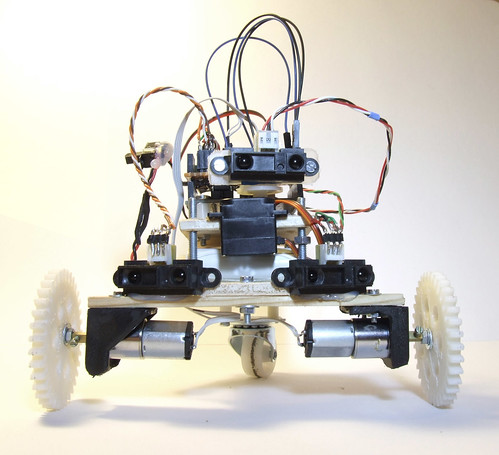
já à algum tempo que não postava uma criatura das minhas.. apresento-vos o demannu, o seu nome provém de "unnamed" escrito ao contrário

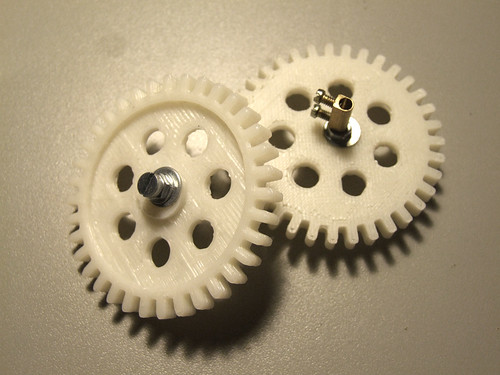
as partes que ligam os parafusos das rodas aos eixos dos motores são retirados de terminais de ligação eléctrica





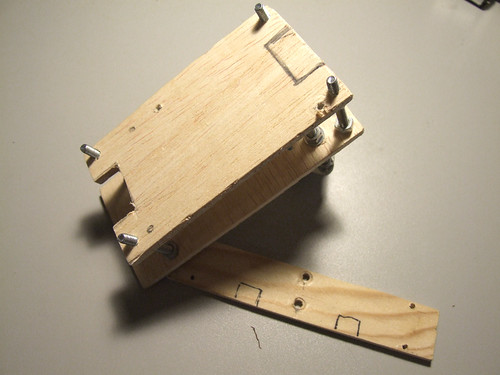

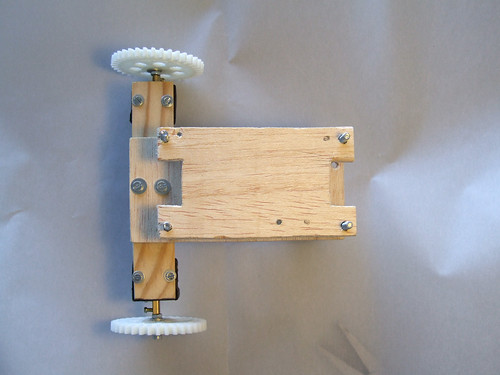
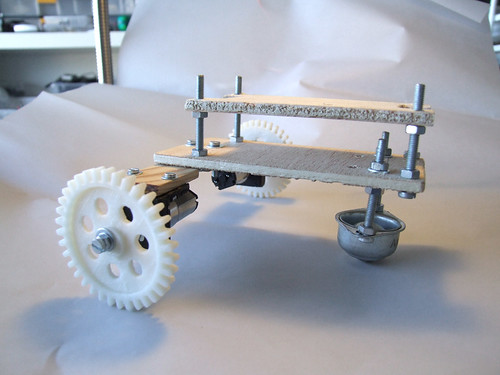

e aqui já começa a ganhar forma
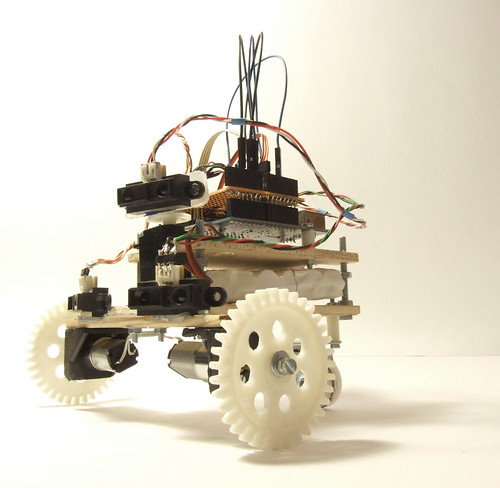
como não estava contente com o seu comportamento adiccionei mais dois sensores à frente, desta maneira quando o sensor central estiver a olhar para um lado e aparecer um obstáculo do outro lado ele saberá que tem que se desviar
o sensor do servo é o modelo GP2Y0A21YK, tem um alcance de 10cm a 80cm
os dois sensores inferiores são os GP2D120XJ00F, têm um alcance de 4cm a 40cm.
Já não tinha fichas JST, então tive que inventar. Soldei os pins do sensor a um conjunto de 3 pins, e por sua vez soldei os fios. A brincadeira saiu cara, pois agora tenho aqui um sensor morto. Se alguém souber como reavivar esta alminha que se acuse

e finalmente o video, espero vir a fazer mais videos assim que tiver tempo

 Visitantes: 503
Visitantes: 503 Spiders: 9
Spiders: 9 Escondidos: 0
Escondidos: 0 Membros: 0
Membros: 0
 Baidu (9)
Baidu (9) Total de Membros:
Total de Membros: