


Olá,
Tinha por aqui uns temporizadores e então decidi postar embora isto não tenha nenhuma dificuldade.


Introdução
Estes temporizadores são muito simples de usar e podem ser utilizados para diversos fins. Normalmente se queremos por exemplo ligar algo durante um minuto usando um microcontrolador, ou usamos um delay de 1 minuto e depois desligamos ou usamos interrupções, em ambos os casos há bastante desvantagens, no primeiro caso ficamos com o micro parado durante um minuto sem poder fazer mais nada, no caso das interrupções, que nem sempre são de fácil implementação, também podem reduzir a performance do microprocessador.
Para definir o tempo usa-se um resistência e um condensador, para se calcular o valor destas deve-se usar a seguinte tabela:
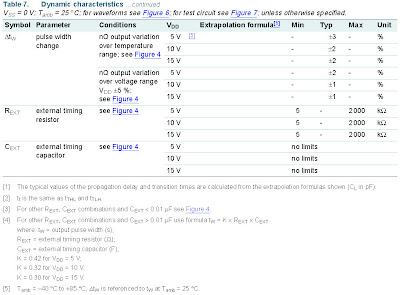
Desta imagem devemos retirar a formula: t=k*R*C em que o k como podem ver na imagem varia com a tensão.
Electrónica \ Montagem
Nesta parte convém consultar as seguintes imagens da datasheet.

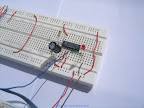
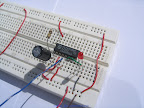
Assim podemos começar a montar o circuito. Uns dos principais componentes é a resistência e o condensador. O condensador deve ser ligado entre os pinos 1 e 2 enquanto que a resistência deve ser ligada entre o pino 2 e Vdd.
Implementação: Arduino \ Microcontroladores
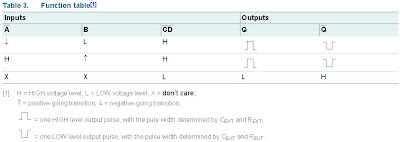
Nesta parte da datasheet temos a tabela de verdade, assim podemos saber como funciona o temporizador, neste caso vou usar a entrada B para activar o temporizador, logo perciso de colocar a A a HIGH, neste caso liguei directamente a 5V.
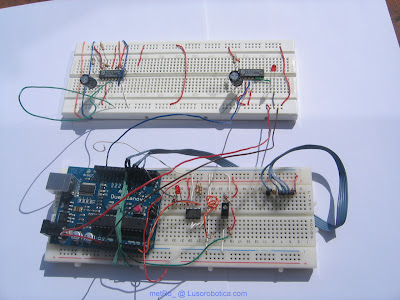
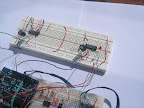
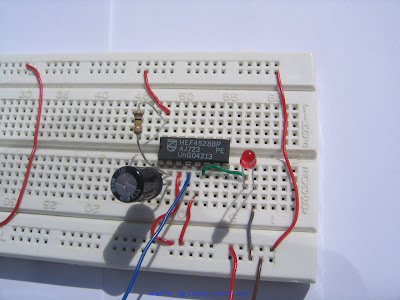
Nesta imagem têm o circuito:
Código: [Seleccione]
#define temporizador 12
void setup(){
pinMode(temporizador,OUTPUT);
activaTemporizador();
}
void loop(){
}
void activaTemporizador(){
digitalWrite(temporizador, LOW);
digitalWrite(temporizador, HIGH);
}
Documentos
Datasheet: http://www.nxp.com/acrobat_download/datasheets/HEF4528B_4.pdf
Embora não seja nada de especial espero que seja útil.











 Visitantes: 507
Visitantes: 507 Spiders: 16
Spiders: 16 Escondidos: 0
Escondidos: 0 Membros: 0
Membros: 0
 Google
Google Total de Membros:
Total de Membros: